



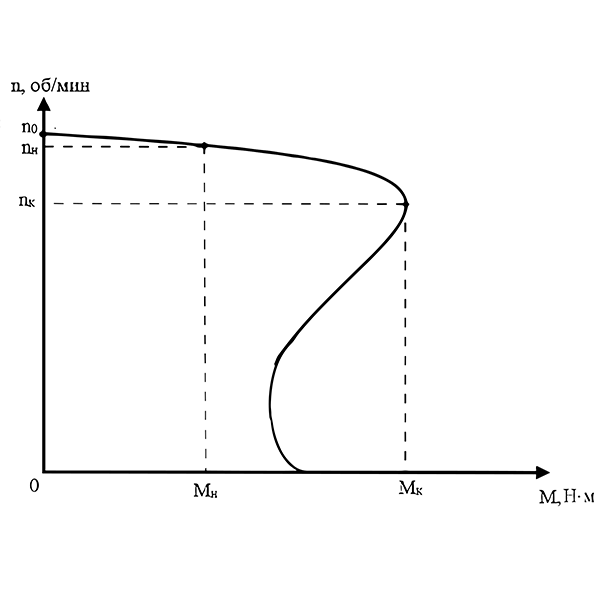
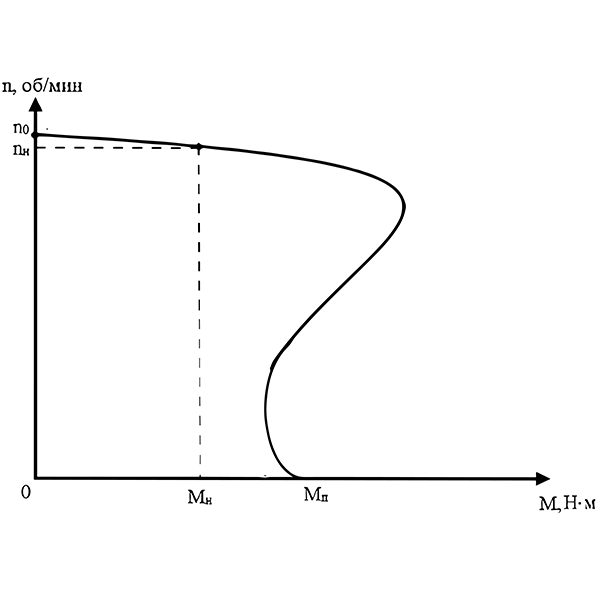
Механическая характеристика. Зависимость частоты вращения ротора от нагрузки (вращающегося момента на валу) называется механической характеристикой асинхронного двигателя (рис. 1). При номинальной нагрузке частота вращения для различных двигателей обычно составляет 98—92,5 % частоты вращения n1(скольжение sном = 2 – 7,5 %). Чем больше нагрузка, т. е. вращающий момент, который должен развивать двигатель, тем меньше частота вращения ротора. Как показывает кривая
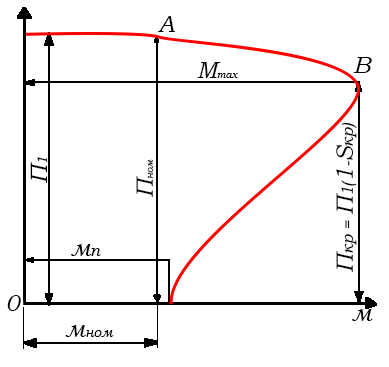
на рис. 1, частота вращения асинхронного двигателя лишь незначительно снижается при увеличении нагрузки в диапазоне от нуля до наибольшего ее значения. Поэтому говорят, что такой двигатель обладает жесткой механической характеристикой.
Наибольший вращающий момент Mmax двигатель развивает при некотором скольжении skp, составляющем 10—20%. Отношение Mmax/Mном определяет перегрузочную способность двигателя, а отношение Мп/Мном — его пусковые свойства.
Двигатель может устойчиво работать только при обеспечении саморегулирования, т. е. автоматическом установлении равновесия между приложенным к валу моментом нагрузки Мвн и моментом М, развиваемым двигателем. Этому условию соответствует верхняя часть характеристики до достижения Mmax (до точки В). Если нагрузочный момент Мнагр превысит момент Mmax, то двигатель теряет устойчивость и останавливается, при этом по обмоткам машины будет длительно проходить ток в 5—7 раз больше номинального, и они могут сгореть.
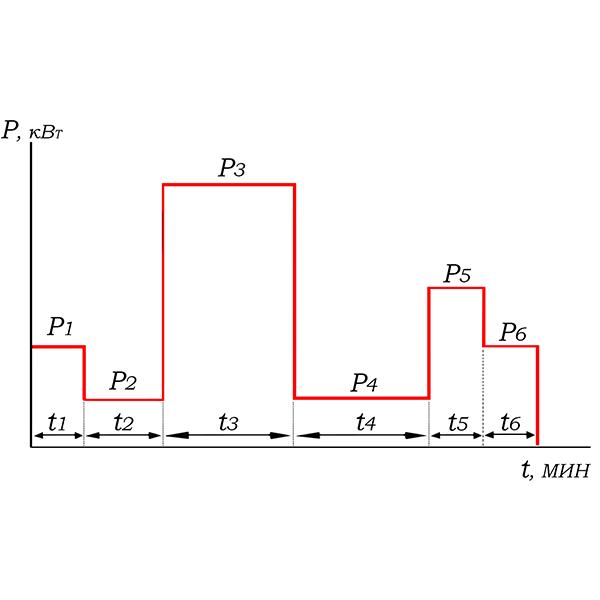
Эквивалентная по нагреву мощность нагрузки на валу электродвигателя представляет собой среднеквадратичную мощность двигателя за рабочий цикл Pэ=
где Pi - мощность на валу электродвигателя в i-й период работы, кВт;
ti - продолжительность i-ro периода работы, мин.;
n - количество периодов нагрузки.
При включении статорной обмотки двигателя в сеть создаётся, вращающееся магнитное поле с синхронной частотой вращения n0.
Вращающееся магнитное поле статора, пересекая набор замкнутых токопроводящих витков подвижной части машины, создает в них ЭДС. Образовавшаяся в замкнутых рамках ротора электродвижущая сила способствует возникновению переменного тока, воспроизводящего свое вращающееся электромагнитное поле.
Вследствие чего, подвижная часть машины начинает вращаться вслед за вращающимся полем со скоростью n2(об/мин), стремясь засинхронизировать свое электромагнитное поле с вращающимся полем неподвижной части, то есть, достичь скорости n0 (об/мин). Величина разницы скоростей в относительных единицах или процентах называется скольжением (S):
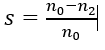
Асинхронная скорость n2 при нормальной эксплуатации электродвигателя всегда меньше синхронной скорости n0, поэтому скольжение асинхронного двигателя меньше единицы и ста процентов.
Электромагнитный момент асинхронного двигателя создается взаимодействием тока в обмотке ротора с вращающимся магнитным полем.
Формула электромагнитного момента асин¬хронной машины записывается следующим образом:
Параметры схемы замещения асинхронной машины r1, r '2 , х1 и х'2 , входящие в выражение (1), являются постоянными, так как их значения при изменениях нагрузки машины остается практически неизменными. Также постоянными можно считать напряжение на обмотке фазы статора U1 и частоту f1. В выражении момента M единственная переменная величина — скольжение s, которое для различных режимов работы асинхронной машины может принимать разные значения в диапазоне от + ∞ до - ∞.
Рассмотрим зависимость момента от скольжения M = f (s) при U1 = const, f1 = const и постоянных параметрах схемы замещения. Эту зависимость принято называть механической характеристи¬кой асинхронной машины. Анализ выражения (1), представ¬ляющего собой аналитическое выражение механической характе¬ристики M = f (s), показывает, что при значениях скольжения s = 0 и s = ∞ электромагнитный момент М = 0. Из этого следует, что механическая характеристика M = f(s) имеет максимум.
Рассмотрим зависимость момента от скольжения M = f (s) при U1 = const, f1 = const и постоянных параметрах схемы замещения. Эту зависимость принято называть механической характеристи¬кой асинхронной машины. Анализ выражения (1), представ¬ляющего собой аналитическое выражение механической характе¬ристики M = f (s), показывает, что при значениях скольжения s = 0 и s = ∞ электромагнитный момент М = 0. Из этого следует, что механическая характеристика M = f(s) имеет максимум.
Для определения величины критического скольжения sкр, со¬ответствующего максимальному моменту, необходимо взять пер¬вую производную от (1) и приравнять ее нулю: dM /ds = 0. В результате
sкр = ± r_2^'/(X_1+X_2^' ) (2)
Выражение максимального момента, соответствующее критическому скольжению, выглядит следующим образом:
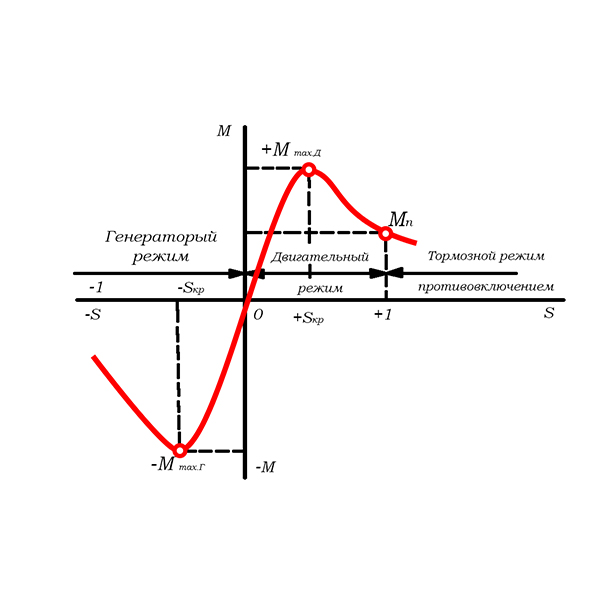
В (2) и (3) знак плюс соответствует двигательному, а знак минус — генераторному режиму работы асинхронной машины.
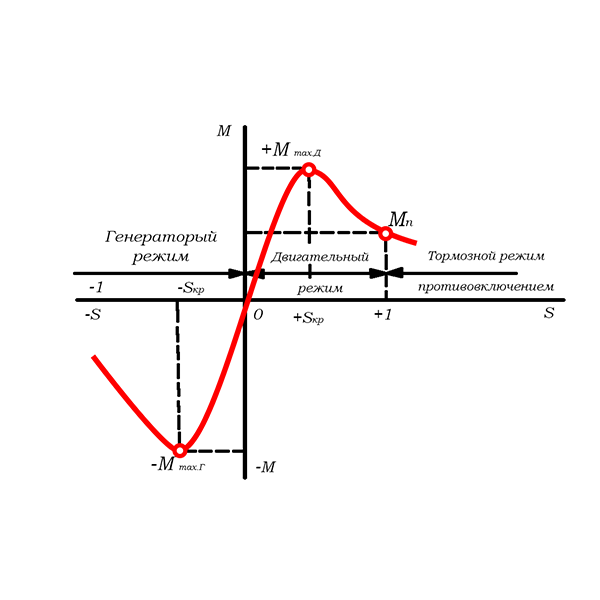
Анализ выражения (3) показывает, что максимальный мо¬мент асинхронной машины в генераторном режиме больше, чем в двигательном (Mmax г > Мmах д). На рис. 3 показана механическая характеристика асинхронной машины М = f (s) при U1 = const. На этой характеристике указаны зоны, соответствующие различным режимам работы: двигательный режим (0 < s ≤ 1), когда электро¬магнитный момент М является вращающим; генераторный режим ( - ∞ < s < 0) и тормозной режим противовключением (1 < s < + ∞), когда электромагнитный момент М является тормозящим.
Из (1) следует, что электромагнитный момент асинхрон¬ного двигателя пропорционален квадрату напряжения сети:M ≡ U12. Это в значительной степени отражается на эксплуатационных свойствах двигателя: даже небольшое снижение напряже¬ния сети вызывает заметное уменьшение вращающего момента асинхронного двигателя. Например, при уменьшении напряжения
на 10% относительно номинального (U1 = 0,9Uном) электромагнитный момент двигателя уменьшается на 19% : M/ =0,92 M, где М— момент при номинальном напряжении сети, а М/ — момент при пониженном напряжении.При включении двигателя в сеть магнитное поле статора, не обладая инерцией, сразу же начинает вращение с син-хронной частотой n0, в то же время ротор двигателя под влиянием сил инерции в начальный момент пуска остается неподвижным (n2 = 0) и скольжение s = 1.
Подставив в (1) скольжение s = 1, получим выражение пускового момента асинхронного двигателя:
Под действием этого момента начи¬нается вращение ро¬тора двигателя, при этом скольжение уменьшается, а вра-щающий момент воз¬растает в соответст¬вии с характеристи¬кой М = f (s). При критическом сколь¬жении sкр момент достигает максималь¬ного значения Мmах. С дальнейшим нараста¬нием частоты вращения (уменьшением скольжения) момент М на¬чинает убывать, пока не достигнет установившегося значения, равного сумме противодействующих моментов, приложенных к ротору двигателя: момента х.х. M0 и полезного нагрузочного мо¬мента (момента на валу двигателя) М2, т. е.
М = М0 + M2 = Mст (5)
Из анализа механической характеристики также следует, что устойчивая работа асинхронного двигателя возможна при скольжениях меньше критического (s < sкр).
Коэффициентом термической перегрузки рт называется отношение потерь при кратковременном режиме работы к потерям при номинальном режиме работы
где tР - полная продолжительность работы электродвигателя с переменной на¬грузкой, мин;
Tн - постоянная времени нагрева электродвигателя, мин.
Постоянную времени нагрева Tн - это время в течение которого электродвигатель успевает нагреться от температуры окружающей среды, до установившейся температуры при условии отсутствия теплоотдачи в окружающую среду.
Постоянную времени нагрева Tн принять для ориентировочного выбора мощности электродвигателя, равной Tн = 20 мин.
Коэффициентом механической перегрузки рм называется отношение мощности нагрузки двигателя в кратковременном режиме Рк к номинальной мощности Рн в продолжительном режиме. Коэффициент механической перегрузки рM определяется через коэффици¬ент тепловой перегрузки двигателя рT
Синхронная частота вращения n0 – это частота вращения магнитного поля статора асинхронного двигателя.Синхронная частота вращения электродвигателя (магнитного поля статора), об/мин находится как
Где p число пар полюсов электродвигателя определяется из следующего выражения (выбирается ближайшее меньшее целое число)
f=50Гц - частота тока в электрической сети;
Кратность пускового тока Iп^* - это отношение пускового тока электродвигателя к номинальному;

Кратность минимального вращающего момента электродвигателя М*м – это отношение минимального вращающего момента электродвигателя к номинальному моменту;
Кратность пускового вращающего момента электродвигателя М*п – это отношение пускового вращающего момента электродвигателя к номинальному моменту;
Кратность максимального вращающего момента электродвигателя М*к – это отношение максимального вращающего момента электродвигателя к номинальному моменту;
Алгоритм выбора двигателя и построение его механической характеристики по нагрузочной диаграмме
Эквивалентная по нагреву мощность нагрузки на валу электродвигателя рассчитывается по выражению
где Pi - мощность на валу электродвигателя в i-й период работы, кВт;
ti - продолжительность i-ro периода работы, мин.;
n - количество периодов нагрузки.
Мощность электродвигателя при его полном охлаждении во время паузы в работе выбирают по каталогу исходя из условия
где Рн - номинальная мощность электродвигателя, кВт;
pм - коэффициент механической перегрузки.
Коэффициент механической перегрузки рM определяется через коэффици¬ент тепловой перегрузки двигателя рT
где tР - полная продолжительность работы электродвигателя с переменной на¬грузкой, мин;
Tн - постоянная времени нагрева электродвигателя, мин (Tн = 20)
Каталожные параметры двигателя свести в таблицу 1
Таблица 1
| Тип электро-двигателя | Рн, кВт | Iн, А | nн, об/мин | cosφн | ηн, % | I_п^* | М*п | М*к | М*м | Jдв, кг∙м2 |
| Тип 1 |
Номинальное скольжение электродвигателя, соответст¬вующее номинальному вращающему моменту определяется по формуле
Синхронная частота вращения электродвигателя (магнитного поля статора), об/мин находится как
Число пар полюсов электродвигателя определяется из следующего выражения (выбирается ближайшее меньшее целое число)
f=50Гц - частота тока в электрической сети;
Механическую характеристику асинхронного электродвигателя ω = f1 (Мдв) строят на основании расчета его вращающих моментов для угловых скоростей, соответствующих скольжениям:
S = 0;
S = SH;
S = 0,1;
S = SK;
S = 0,4;
S = Sм = 0,8;
S=1.
Значения пускового и минимального вращающих моментов следует определить по следующим формулам
Mп=Mн∙Mп^* при s=1
Mм=Mн∙Mм^* при s=0,8
Mм=Mн∙Mм^* при s=0,8
Mн=Pн/ωн
Значения пускового и минимального вращающих моментов следует определить по следующим формулам
где Мн - номинальный вращающий момент электродвигателя, Нм;
ωн - номинальная угловая скорость электродвигате¬ля, 1/с
nн - номинальная частота вращения, об/мин.
Остальные вращающие моменты электродвигателя для скольжений от 0 до 0,4 рассчитываются на основании упрощенной формулы Клосса:
где Мк = Мн ∙ М*к - максимальный вращающий момент электродвигателя, Н м;
Критическое скольжение электродвигателя, соответствующее максимальному вращающему моменту определяется по следующей формуле
Данные расчета механической характеристики ω = f1 (Мдв) свести в таблицу 2. Переход от скольжения к угловой скорости произвести по формуле
где ω0 - синхронная угловая скорость вращения вала электродвигателя, 1/с.
Для приведения моментов вращения рабочей машины к валу электродвигателя, необходимо использовать следующее соотношение

где i=nн/nРМН передаточное отношение передачи от электродвигателя к рабо¬чей машине
Давая ω значения от 0 до ω=ω0, рассчитывают зависимость ω = f2 (Мс). На основании этих расчетных данных строится кривая ω = f2 (Мс) на том же графике, что и механическая характеристика электродвигателя ω = f1 (Мдв).
Таблица 3
| s | 0 | sн=0,1 | sк=0,4 | sк=0,8 | sк=1,0 |
| ω, 1/с | ω0=0 | ωн=0.1 | ωк=0.4 | ωм=0.8 | 0 |
| Mс, Н∙м |
Таблица 2
| s | 0 | sн=0,1 | sк=0,4 | sк=0,8 | sк=1,0 |
| ω, 1/с | ω0=0 | ωн= | ωк= | ωм=0 | |
| M, Н∙м | 0 | Mн= | Mк= | Mм= |
При построении механических характеристик ω = f1 (Мдв) значения ω рас¬полагают по оси ординат (функция), а значения М - по оси абсцисс (аргумент).