Динамическая инфографика


Первое практическое использование электродвигателя постоянного тока, оснащенного другими характерными элементами
электропривода: механической передачей, органами управления и обеспечивавшего движение катера вверх по р. Неве, относят
к 1834 – 1838 гг. и связывают с именем акад. Б.С. Якоби.
Большее применение нашли электроприводы с ДПТНВ. Особое место на сегодняшний день занимает система «Тиристорный преобразователь - двигатель», замкнутые системы управления электроприводом.
Выпускаются двигатели постоянного тока общепромышленной серии 2П, 4П, различного конструктивного исполнения для работы в регулируемых электроприводах с высокими энергетическими показателями.
Для электропривода металлорежущих станков кроме серий 2П и 4П применяются двигатели серий ПБСТ и ПГТ, высокомоментные двигатели серий ПБВ, двигатели серии ДК1 и ДК2 с возбуждением от постоянных магнитов, для крановых механизмов выпускаются двигатели серии Д с независимым и последовательным возбуждением. Краново-металлургические электроприводы также имеют двигатели с независимым, последовательным, и смешанным возбуждением серий 2П.
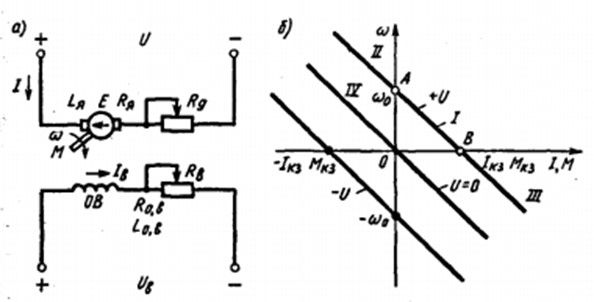
Электромеханическая и механическая характеристики ДПТНВ представляют собой линейные зависимости угловой скорости двигателя от тока и момента. Различают естественную и искусственную характеристики двигателей. Естественная характеристика двигателя (она у него единственная) соответствует основной (паспортной) схеме его включения и номинальным параметрам питающего напряжения
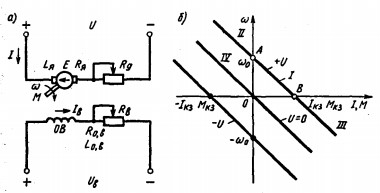
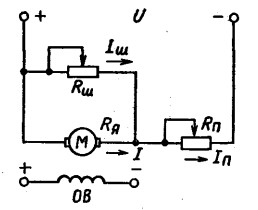
Рисунок 1 – Схема включения (а) и характеристики (б) ДПТНВ
При одинаковых направлениях тока и ЭДС имеет место двигательный режим работы, а при противоположных направлениях скорости и момента и одинаковых направлениях ЭДС и тока – генераторный.
Режим холостого хода. ( точка В) Двигатель не получает энергии ни из электрической сети, ни с вала, при этом I = 0, E = U = kФ ω , М = 0, ω = ω .
Двигательный режим. При этом Е<U, ток I=(U-E)/R совпадает по направлению с напряжением U и не совпадает с ЭДС, электрическая энергия поступает из сети, а механическая энергия с вала двигателя передаётся исполнительному органу.
Генераторный режим параллельно с сетью или торможение с рекуперацией энергии в сеть. При этом ω > ω , поэтому ЭДС больше напряжения сети, ток и момент изменяют свои направления на противоположные. Двигатель получает механическую энергию от рабочей машины и отдаёт электрическую в сеть.
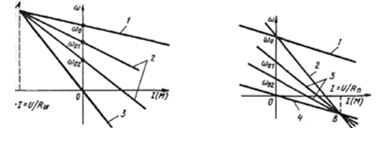
Режим короткого замыкания (точка А) возникает при ω = 0 и Е = 0, при этом I=IКЗ =U/R. Электрическая энергия, поступающая из сети, рассеивается в виде тепла в резисторах якорной цепи. Режим короткого замыкания возникает при неподвижном состоянии якоря, в числе при пуске.
Режим генератора при его последовательном соединении с сетью или торможение противовключением наступает при ω < 0. За счёт изменения направления скорости ЭДС также меняет свою полярность. Ток в якоре совпадает по направлению с напряжением и ЭДС и определяется их суммарным действием, то есть I=(U+E)/R. Электроэнергия, поступающая из сети и вырабатываемая двигателем за счёт механической энергии рабочей машины, рассеивается в виде тепла в резисторах.
Режим автономного генератора.(Рисунок 2) Ток в якоре протекает под действием ЭДС и совпадает с ней по направлению. Электроэнергия вырабатывается за счёт поступающей с вала механической энергии рабочей машины и рассеивается в виде тепла в резисторах цепи якорной.
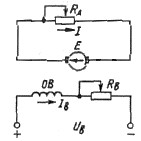
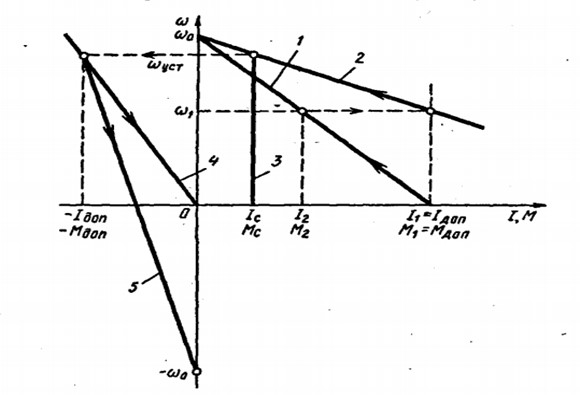
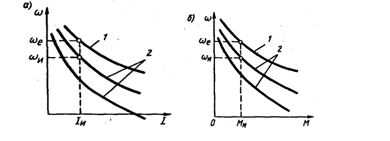
Пуск двигателя сначала происходит по искусственной характеристике 1 с резистором RД в цепи якоря, называемым пусковым. По мере разгона двигателя ЭДС увеличивается, а двигателя ток снижается, и при некоторой скорости ω резистор выводится из цепи якоря. Двигатель переходит на работу по естественной характеристике 2, ток не превышает допустимого значения, двигатель работает при заданной нагрузке в точке установившегося движения, определяемого нагрузкой исполнительного органа.
Динамическое торможение происходит по характеристике 4, для ограничения тока обмотка якоря закорачивается на резистор. Реверс и торможение противовключением ДПТНВ происходят по характеристике 5, для этого изменяют полярность напряжения якоря или обмотки возбуждения и включают в цепь якоря резистор.
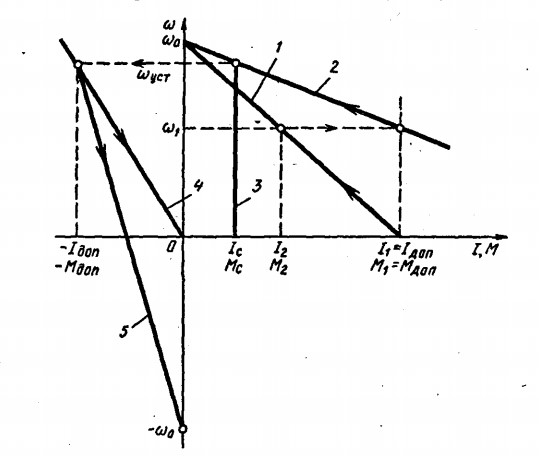
Магнитный поток возбуждения изменяется за счет изменения тока возбуждения.
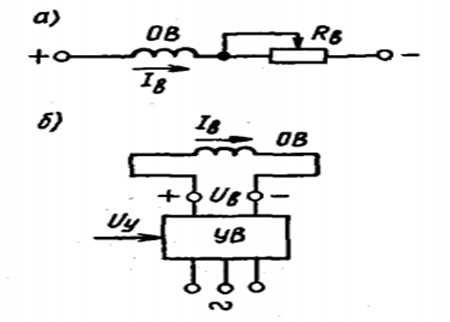
Регулирование тока в цепи возбуждения может выполнятся:
а) с помощью добавочного резистора RД вцепи обмотки возбуждения;
б) изменением напряжения питания обмотки возбуждения от управляемого выпрямителя по сигналу управления
Показатели регулирования скорости ДПТНВ изменением магнитного потока следующие: диапазон регулирования 3 ... 4; направление регулирования - вверх от естественной характеристики; плавность регулирования определяется плавностью регулирования тока возбуждения, экономичность с точки зрения потерь и затрат.
а) – электромеханическая и б) – механические характеристики.
Регулирование скорости изменением магнитного потока рекомендуют при обеспечении постоянной механической мощности нагрузки.
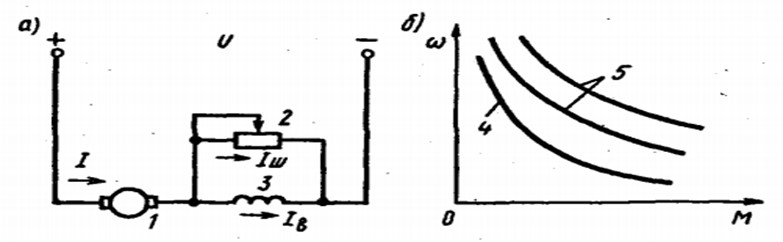
Регулирование скорости ДПТ независимого возбуждения в схеме с шунтированием якоря.
Привод подъёмно – транспортных машин и механизмов с целью получения пониженных скоростей движения их исполнительных органов рекомендует применения схем с шунтированием якоря двигателя постоянного тока независимого возбуждения.
Показатели такого способа регулирования: диапазон регулирования скорости 5…6; плавность регулирования, определяемую плавностью изменения сопротивлений; жёсткость характеристик малая, неэкономичность.
Импульсное регулирование заключается в изменением напряжения, магнитного потока или сопротивления резистора в цепи якоря с помощью электронных полупроводниковых ключей (тиристорных, транзисторных, диодных) с определённой скважностью. Скважность (заполнение) это отношение времени, когда ключ находится в замкнутом состоянии к общему периоду коммутации.
При импульсном регулировании резистор с определенной скважностью закорачиваем накоротко с помощью ключа.
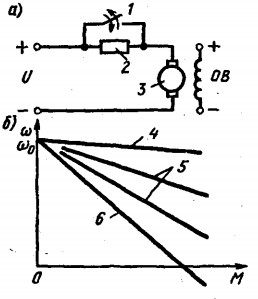
Рисунок 1 – Схема включения (а) и характеристики (б) ДПТНВ при импульсном регулировании сопротивления добавочного резистора в цепи якоря
При импульсном регулировании магнитного потока двигателя (рисунок 2), в цепь обмотки возбуждения 4 включён добавочный резистор 3, который с определенной периодичность шунтируется ключом 2.
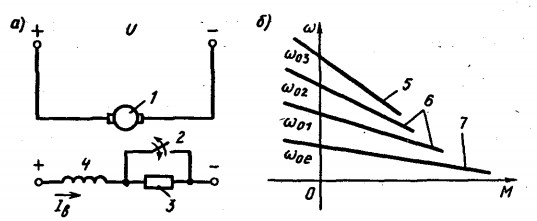
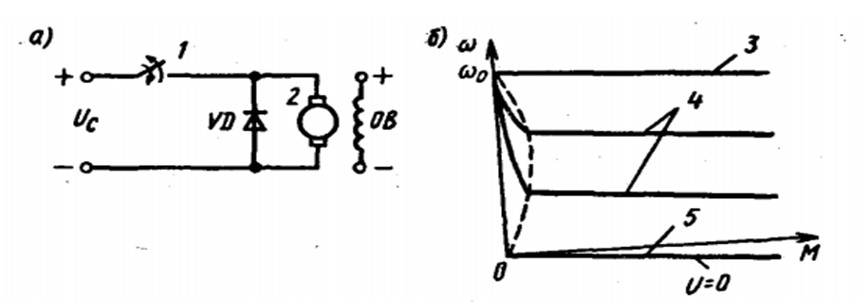
Рисунок 2 – Схема включения (а) и характеристики (б) ДПТНВ при импульсном регулировании магнитного потока двигателя.
Напряжение питания ключом 1 периодически подается на якорь (рисунок 3). При размыкании ключа ток протекает от ЭДС самоиндукции двигателя, замыкаясь через диод VD.
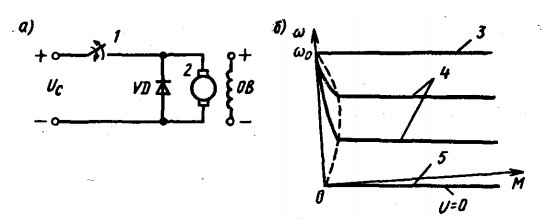
Рисунок 3
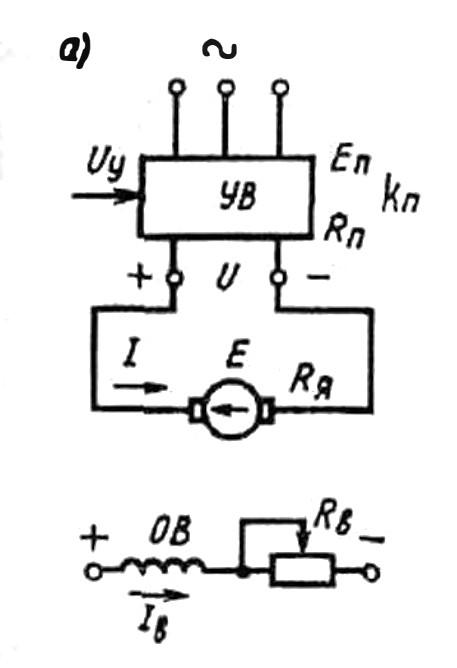
В качестве преобразователя используется управляемый выпрямитель (УВ). Управляемый выпрямитель выполняется в виде двух систем: генератор – двигатель(Г-Д) и тиристорный преобразователь – двигатель(ТП-Д).

Система «генератор - двигатель». Якорь двигателя постоянного тока 4 присоединяется к якорю 3 генератора, образующего вместе с приводным асинхронным или синхронным двигателем 1 электромашинный выпрямитель 2 . Для регулирования напряжения на якоре двигателя изменяют ток возбуждения IВГ в обмотке 7 и ЭДС генератора 3 помощью потенциометра 8. При изменении сопротивления потенциометра 6 изменяется магнитный поток и обеспечивается также регулирование скорости.
К достоинствам системы Г - Д относят: большой диапазон и плавность регулирования скорости двигателя, высокую жесткость и линейность характеристик, возможность получения всех энергетических режимов работы. Недостатки системы Г-Д: утроенная мощность системы, низкий КПД, инерционность процесса регулирования, шум.
Система «тиристорный прео6разователь – двигатель». Тиристорные преобразователи представляют собой управляемые реверсивные или нереверсивные выпрямители, собранные по нулевой или мостовой однофазной или трехфазной схемам. В них используются силовые тиристоры.

Управляемый выпрямитель (преобразователь) состоит из согласующего трансформатора Т, двух тиристоров VSJ и VS2, сглаживающего реактора с индуктивностью L и системы импульсно-фазового управления СИФУ.
Изменения среднего значения своей ЭДС Eп обеспечивает регулирование напряжения на выходе. Система импульсно-фазового управления СИФУ изменяет угол управления тиристорами α (угол задержки открытия тиристоров VS1 и VS2) по сигналу управления Uу. Если же подача импульсов управления с помощью СИФУ на тиристоры VSJ и VS2 происходит со сдвигом (задержкой) на угол α отличный от нуля (α ≠ 0), то ЭДС преобразователя снижается. При этом уменьшается среднее значение выпрямленного напряжения, а, следовательно, напряжение подаваемое на двигатель.
Реверсивные управляемые выпрямители необходимы для получения характеристик двигателя во всех режимах, которые состоят из двух нереверсивных выпрямителей с выводом нулевой точки, а также за счет изменения направления тока возбуждения двигателя.
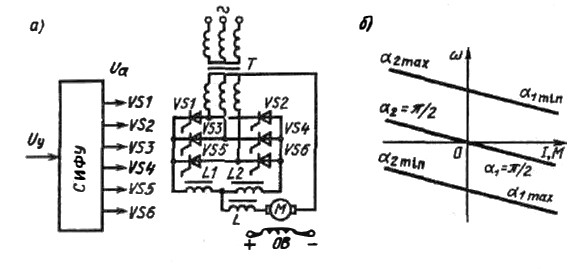
В реверсивных управляемых выпрямителях раздичают совместное и раздельное используютея два основных принципа управления комплектами вентилей:.
При совместном управлении импулься управления тиристорами подаются на тиристоры катодной и анодной группы одновременно. Одина из них работает в впрямительном режиме, а другая в инверторном. При разности ЭДС между комплектами тиристоров появляется уравнительный ток. Для уменьшения уравнительного тока используют уравнительные реакторы L1 и L2. Если угол согласования между комплектами тиристоров поддерживается равным π, то уранительный ток не возникает.
При раздельном управлении импульсы управления подаются только на один из комплектов, который должен в данный момент проводить ток, поэтому уравнительный ток не ворзникает.
При совместном управлении с помощью специального логического переключающего устройства (ЛПУ)комплекты тиристоров работают поочередно и уравнительный ток не возникает.
Достоинства системы «тиристорный преобразователь- двигатель»: плавность и большой диапазон регулирования скорости; жесткость искусственных характеристик (характеризует наименьшую степень изменения частоты вращения при изменении нагрузки); высокий КПД электропривода; бесшумность; простота в обслуживании и эксплуатации.
Недостатки системы «тиристорный преобразователь- двигатель»: необходимость использования реверсивного преобразователя; пульсации напряжения на якоре, наличие режима прерывистого тока, при котором характеристики теряют жесткость и становятся нелинейными; снижение коэффициент мощности (cosφ) электропривода; искажения формы тока и напряжения источника питания; невысокая помехозащищенностью схем и малая перегрузочная способностью.
Система тиристорный преобразователь двигатель является высокоэффективным регулируемым ЭП постоянного тока.
В электроприводах электрического транспорта и грузоподъёмных машин и механизмов используются двигатели постоянного тока последовательного возбуждения (ДПТПВ) (рисунке 1). Обмотка возбуждения 2 включена последовательно с обмоткой якоря 1 и добавочным резистором 3.

Схема включения (а) и кривая намагничивания (б)
При малой нагрузке двигателя скорость двигателя резко возрастает, что может привести к механическому разрушению двигателя. Для двигателя последовательного возбуждения не существуют режимы холостого хода и генератора, работающего параллельно с сетью.
Достоинства регулирования с помощью резисторов: простота, диапазон регулирования 2…3; плавность регулирования зависит от характера изменения сопротивления.
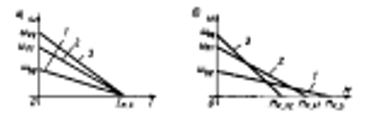
Регулирование скорости двигателя с последовательным возбуждением изменением магнитного потока, напряжения и шунтированием резистором якоря.
Регулирование скорости изменением магнитного потока осуществляется изменением сопротивления резистора 2, включённого параллельно обмотке возбуждения 3 двигателя.
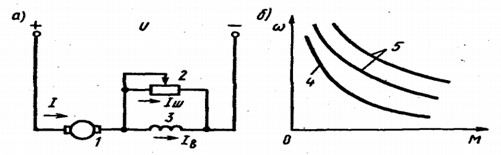
Схема включения (а) и механические характеристики (б) ДПТПВ
При регулировании скорости изменением напряжения двигатель 2 подключается к управляемому выпрямителю 1 выходное напряжение которого изменяется по определенному закону для получения требуемой скорости.
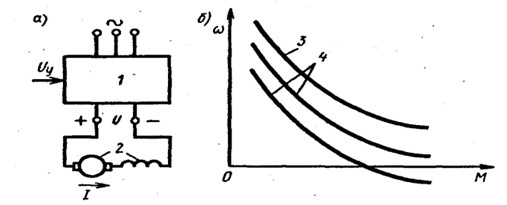
Схема включения (а) и характеристики (б) ДПТПВ
Регулирование скорости шунтированием якоря резистором используется для получения пониженных скоростей ЭП с ДПТПВ.
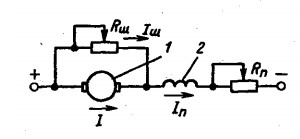
Схема включения ДПТПВ
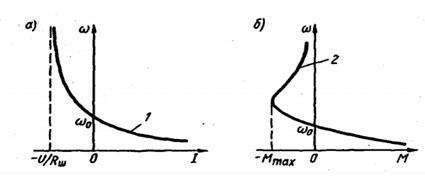
Электрические (а) и электромеханические (б) характеристики ДПТПВ
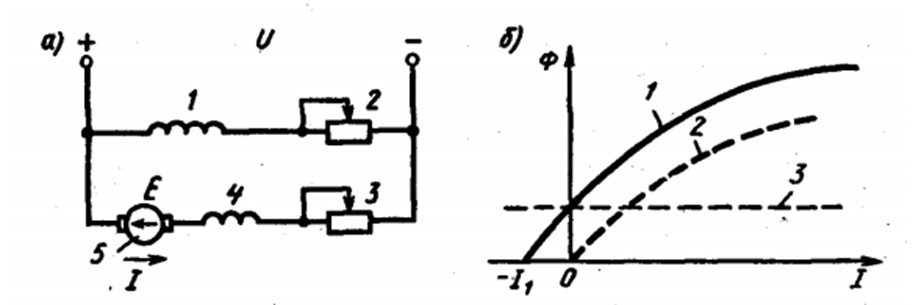
ДПТСВ имеет независимую обмотку возбуждения, включенную последовательно с резистором 2 и последовательную обмотку возбуждения 4, включаемую последовательно с резистором 3 и обмоткой якоря 5. Результирующий магнитный поток создается обеими обмотками. Зависимость магнитных потоков обмоток (кривые 2 и 3) и результирующего(суммарного) потока (кривая 1) от тока якоря показана на рисунке б).
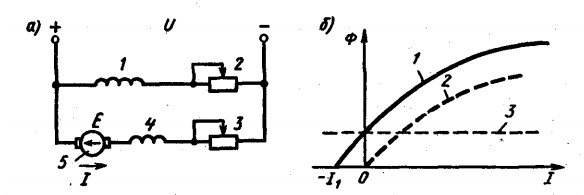
Рисунок 1 – Схема включения (а) и кривые зависимости магнитного потока Ф от тока якоря I
Двигатель постоянного тока смешанного возбуждения ДПТСВ может работать во всех возможных энергетических режимах, а координаты электропривода можем менять изменением напряжения, магнитного потока и сопротивления в цепи якоря.

Федеральный государственный образовательный стандарт среднего профессионального образования по специальности
13.02.11 Техническая эксплуатация и обслуживание электрического и электромеханического оборудования (по отраслям), утвержден Приказ Минобрнауки России от 07.12.2017 N1196 (ред. от 01.09.2022)
ПОП Профессионалитета
13.02.11 Техническая эксплуатация и обслуживание электрического и электромеханического оборудования (по отраслям)
ПМ. 01
Организация простых работ по техническому обслуживанию и ремонту электрического и электромеханического оборудования
МДК 01.04
Электрическое и электромеханическое оборудование
Раздел
Электрическое и электромеханическое оборудование
Тема
Электроприводы с двигателями постоянного тока
Ключевые слова
Электрический привод (ЭП) - управляемая электромеханическая система, предназначенная для преобразования электрической энергии в механическую и обратно и управления этим процессом.
Механическая характеристика двигателя - зависимость скорости от развиваемого момента ɷ(М).
Естественная механическая характеристика двигателя - (единственная) соответствует основной (паспортной) схеме его включения и номинальным параметрам питающего напряжения.
Электромеханическая характеристика двигателя - зависимость скорости от тока ɷ(I).
Диапазон регулирования скорости - отношение максимальной скорости к минимальной, т.е. D = nmax /nmin..
Плавность регулирования скорости - определяется перепадом скорости при переходе с одной искусственной характеристики на другую.
Стабильность - скорости, характеризуемая изменением скорости при возможных колебаниях момента нагрузки на валу двигателя и определяемая жесткостью его механических характеристик.
Экономичность регулирования скорости - характеризует наименьшую степень изменения частоты вращения при изменении нагрузки электропривода, количественная оценка механической характеристики двигателя и исполнительного органа, β = dM/dω.
Реверс - изменение направления вращения двигателя.
Динамическое торможение ДПТНВ - закорачивание обмотки якоря на резистор.
Рекуперация - отдача энергии в сеть.
